.bmp) After many years of research and testing I have finally started to mass produce my own design of a Universal robot controller Circuit Board. My goal was to produce a small computer that could directly drive motors and that had low cost long range remote control and that could provide real-time inputs to the computer. A cheap computer (couple of dollars), 4 cheap digital 1amp motor drivers (couple of dollars) and a cheap long range remote control system (couple of dollars). I just wanted a cheap circuit I could drop in any toy with motors and remotely operate the motors with some computer control in there, to operate sequences of movements or complex motor actions (1000 lines of code that can do math maybe?) from a simple press on a remote button. Oh and want to buy the cheapest chips and remotes I could buy on eBay. This is the Red Dragon 1 with the a PICAXE 18M2 multitasking microcomputer (it can have 4 programs running at the same time but they are actually only executed one at time, just very fast).
After many years of research and testing I have finally started to mass produce my own design of a Universal robot controller Circuit Board. My goal was to produce a small computer that could directly drive motors and that had low cost long range remote control and that could provide real-time inputs to the computer. A cheap computer (couple of dollars), 4 cheap digital 1amp motor drivers (couple of dollars) and a cheap long range remote control system (couple of dollars). I just wanted a cheap circuit I could drop in any toy with motors and remotely operate the motors with some computer control in there, to operate sequences of movements or complex motor actions (1000 lines of code that can do math maybe?) from a simple press on a remote button. Oh and want to buy the cheapest chips and remotes I could buy on eBay. This is the Red Dragon 1 with the a PICAXE 18M2 multitasking microcomputer (it can have 4 programs running at the same time but they are actually only executed one at time, just very fast).So its not just a remote controlled motor driver, but motor drivers with a computer interface. The PICAXE 18M2 microcomputer lets you run about 1800 lines of code. I intended to use the RED DRAGON as a cheap universal remote control for toy vehicles and robots. Just take a remote control toy that has lost its remote, cut out the radio circuit, solder the RED DRAGON to the motor wires there you go. You made a long range RC Robot with a computer interface. The RED DRAGON 1 is a full function PICAXE 18M2 breakout board. The serial port programming resistors are on board so only a serial cable is required to program the PICAXE. 8 of the PICAXE output pins are connected to 2 on L293D chips that can directly power 1 amp motors using program control. Here is the basic board layout.

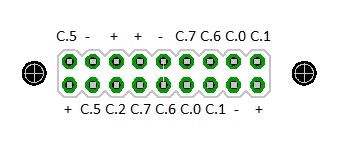
There are also spare POS + and GND ports on the pin header that can be used. The power is the same 6+volt POS PICAXE & RADIO bus. The - GND is the connected to the 2 other GND connectors on the board. Please note the GND for PICAXE and Radio power is tied to the GND on the motor supply connector. These GNDs must stay connected for the proper function of the Motor Driver circuit. It has been tested that the POS + for the PICAXE and the POS + for the Motor Supply can be the same source if the motors do not pull too much current. Otherwise high current on the motors can cause the PICAXE to reboot randomly.
No comments:
Post a Comment